









FAQs
Videos
LORD Sensing MicroStrain warrants this product to be free from defective material and workmanship for a period of one (1) year from the original date of purchase. LORD Sensing MicroStrain agrees to repair or replace, at its sole discretion, a defective product if returned to LORD Sensing MicroStrain within the warranty period and accompanied by proof of purchase. This warranty does not extend to any LORD Sensing MicroStrain products which have been subject to misuse, alteration, neglect, accident, incorrect wiring, mis-programming or to use in violation of operating instructions furnished by us, nor extend to any units altered or repaired for warranty defect by anyone other than LORD Sensing MicroStrain. This warranty does not cover any incidental or consequential damages and is in lieu of all other warranties expressed or implied and no representative or person is authorized to assume for us any other liability in connection with the sale of our products. Some states do not allow limitations on how long an implied warranty lasts, and/or the exclusion or limitation of incidental or consequential damages so the above limitations and exclusions may not apply to the original customer.
To enable customers to try our products risk free, LORD Sensing MicroStrain offers a 30-day return on the purchase of a starter kit. In order to take advantage of this offer, a purchase order or payment for the starter kit is required when the order is placed. If the product is not suited to the application, the product may be returned within 30 days from the date of receipt for a full refund (excluding shipping and handling), as long as the product is unaltered or undamaged. Items can only be returned after LORD Sensing MicroStrain has issued an RMA. Items must be packed to withstand shipping and returned freight pre-paid. LORD Sensing MicroStrain will inspect the items returned and issue a refund or credit once the items have been examined and are deemed to be unaltered or undamaged. Non-standard or custom products may only be returned with LORD Sensing MicroStrain's approval and a re-stocking penalty may be assessed. A 30-Day Return must be initiated by receiving an RMA (Returned Merchandise Authorization from LORD Sensing MicroStrain.
The Terms and Conditions of Sale for this inertial sensor can be found here.
When you receive your inertial sensor, you can immediately begin operating it with our SensorConnect software.
SensorConnect is a Microsoft Windows-based out-of-the-box software utility that allows users to fully configure and operate inertial sensors, as well as store, display, and export data. Many users will be able to accomplish their use of the inertial sensor with just SensorConnect.
Click here to learn more and download SensorConnect.
SensorConnect does not guarantee full support of legacy products. Click here for a comple list of inertial products supported by SensorConnect.
MIP Monitor remains available for use with legacy products. Click here to download MIP Monitor.
If one was to attempt dead reckoning, one would follow this path:
1: The inertial sensor provides acceleration with respect to its body-fixed coordinate system. This must be transformed into a coordinate system fixed to the earth. In order to accomplish this, it is necessary to know the orientation of the inertial sensor relative to the earth-fixed coordinate system.
2. Subtract the gravity vector.
3. Double integrate (WRT time) the acceleration.
Note that any small errors in either the orientation estimate, or the sensor’s acceleration bias, or the knowledge of the gravity vector will result in exponentially increasing errors. The size of these errors has no bounds.
We generally do not recommend our sensors for applications involving position measurement due the exceptional difficultly of such computations.
Even the best systems, costing hundreds of thousands of dollars, are subject to error accumulation on the order of 1 kilometer per hour.
The bias errors of the industrial grade accelerometers used in the inertial sensor will produce errors of many kilometers within seconds.
This assumes that the orientation is known perfectly.
Uncertainty in the orientation measurement will make the errors even larger.
These inertial instruments use MEMS sensors (accelerometers, gyroscopes).
These MEMS sensors are classified as 'automotive' or ‘industrial’ grade.
They are not 'tactical' or 'navigational' grade.
The bottom line is that the inertial sensor cannot directly provide a displacement measurement.
Let us also be very clear that this statement is not meant to dissuade you; it is meant to set the tone for the complexity involved in this application.
Papers such as this discuss the science involved in great detail: https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&ved=0ahUKEwiCsraTjO3RAhWj24MKHXIvBIAQFggaMAA&url=https%3A%2F%2Fsciforum.net%2Fconference%2Fecsa-1%2Fpaper%2F2395%2Fdownload%2Fpdf&usg=AFQjCNEqcxQZFt3dmpiyKJOTzcNXiwgnzA&cad=rja[na01.safelinks.protection.outlook.com]
Vibration impacts MEMS-based inertial sensors; this is true for our inertial sensors or any other manufacturers.
Every effort must be made to eliminate vibration.
Vibration in the environment frame can significantly degrade the performance of the inertial sensor, particularly constant, unchanging vibration.
Strong, continuous vibrations appear as unaccounted noise to the filter, degrading its performance.
The accelerometers can't tell the difference between vibration and acceleration, and therefore the filter receives erroneous input.
We would suggest using some vibration damping materials to mount the inertial sensor.
Here are some product manufacturers:
· http://www.earsc.com/
· http://www.sorbothane.com/
Here is an on-line source for ordering small quantities, small squares of material: http://www.mcmaster.com/#ultra-soft-polyurethane/=gai91i
The idea is to place the pad between the vehicle frame and the inertial sensor to isolate the inertial sensor.
There are many ways to physically accomplish this damping.
As an example, you could mount the inertial sensor on the aluminum plate and place a Sorbothane pad between the plate and the vehicle frame.
Sorbothane can be purchased with double-sided adhesive.
Be careful not to defeat the isolation by using through-bolts that transfer the vehicle frame vibration to the inertial sensor (or in this example, the aluminum plate holding it).
Utilize the Bandwidth Calculator to determine how many nodes can be ran on one base station.
The WSDA-2000 is configured to send data to our SensorCloud service, and cannot be reprogrammed to send data elsewhere. The SensorCloud API can be used to copy/move data from SensorCloud to another cloud service, or our Microstrain Communications Library (MSCL) can be used to create software to configure wireless sensors, start them sampling, collect data and handle to data in any manner the user desires.
A WSDA gateway must be used to collect data from our wireless nodes.
When you open the SensorConnect application you will find an icon in the top right corner of the window that looks like 3 horizontal lines:
When this icon is highlighted in orange that indicates that an update is available. Click on the icon and select “update available”:
This will direct you to the location of the SensorConnect downloads page on the MicroStrain website.
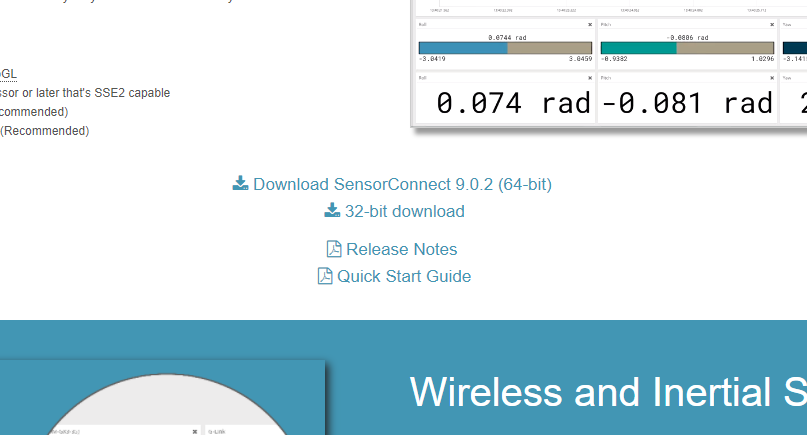
Click on the download that corresponds to your system’s configuration (64-bit vs. 32-bit). Once the download has completed double click the “SensorConnect_X.X.X.msi” file to run the installation. Follow the on-screen prompts to perform the update. Note: SensorConnect will need to be closed in order to complete the installation.
When you re-open SensorConnect the icon in the top right corner or the window should no longer be highlighted in orange, indicating that you are running the latest version of the application.
