









Applications
Apps Overview
Downloads
Parameters
Related Products
- By
- Posted Monday, July 27, 2015 - 11:15
Miniature Attitute Heading Reference System with build in GPS wirelessly communicate continuous acceleration, angular rate, magnetic field, and location data without impacting flight performance.
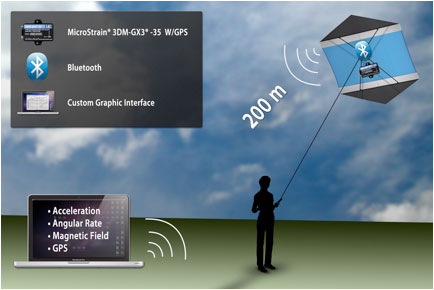 Inertial sensors can provide a wealth of orientation, position and timing information for independently operating machines. The need to extract reliable inertial data in unmanned and remote applications continues to demand more precise and autonomous sensors. In a project with the Quad Cities Collaboration and Hackerspace Laboratory, MicroStrain’s miniature inertial sensor was used to demonstrate real-time wireless monitoring of a lightweight kite during flight. The solution captured and communicated continuous acceleration, angular rate, magnetic field, and GPS location without impacting flight performance. Furthermore, the flexible system supported the development of a custom graphic interface. The development of smaller, more cost-effective inertial sensors promotes their adoption in a growing number of fields with an emphasis on integrating high performance sensors in everyday applications.
Inertial sensors can provide a wealth of orientation, position and timing information for independently operating machines. The need to extract reliable inertial data in unmanned and remote applications continues to demand more precise and autonomous sensors. In a project with the Quad Cities Collaboration and Hackerspace Laboratory, MicroStrain’s miniature inertial sensor was used to demonstrate real-time wireless monitoring of a lightweight kite during flight. The solution captured and communicated continuous acceleration, angular rate, magnetic field, and GPS location without impacting flight performance. Furthermore, the flexible system supported the development of a custom graphic interface. The development of smaller, more cost-effective inertial sensors promotes their adoption in a growing number of fields with an emphasis on integrating high performance sensors in everyday applications.
Light, Rugged Inertial Sensor
The QC Co-Lab, in collaboration with Hamilton Technical College, set out to perform low altitude flight tests during Iowa’s Quad Cities Kite Festival. The project objective was to generate a remote display of a kite’s orientation and location using only wireless inertial and GPS sensors. Lift limitations restricted the incorporation of additional weight. As a result, sensor profile and weight were a primary consideration.
The project selected the MicroStrain 3DM-GX3®-35 inertial sensing suite with embedded GPS capabilities. The 3DM-GX3-35 is the smallest, lightest Attitude Heading Reference System (AHRS) with GPS available on the market. Each device is individually calibrated for temperature, sensitivity and sensor misalignment. Furthermore, MicroStrain’s inertial solution is enclosed in a ruggedized aluminum case, and weighs less than 50g per unit. Because of its miniature, lightweight design the project was able to incorporate inertial sensing capabilities with minimal impact on the weight and weight distribution of the kite body. Low energy consumption capabilities reduced both the weight and size of external batteries. The RS-232 communication interface supported a GPS antenna and Bluetooth connectivity for wireless data transmission.
Real Time Visualization
 The result successfully monitored tri-axial acceleration, angular rate, magnetic field and altitude from a distance of over 200 meters. Visual representations of kite orientation and rotation were displayed in real-time using the QC Co-Lab’s custom interface developed with C++ and Linux. In addition, the ground portal contained a text window to convey live GPS, roll, pitch, and yaw data streams. Customizable data outputs enabled the project to adjust and optimize monitoring rates for extended battery life and kite deployment.
The result successfully monitored tri-axial acceleration, angular rate, magnetic field and altitude from a distance of over 200 meters. Visual representations of kite orientation and rotation were displayed in real-time using the QC Co-Lab’s custom interface developed with C++ and Linux. In addition, the ground portal contained a text window to convey live GPS, roll, pitch, and yaw data streams. Customizable data outputs enabled the project to adjust and optimize monitoring rates for extended battery life and kite deployment.
Lightweight, miniature AHRS sensors extend the application and functional reach of embedded inertial monitoring. The reliable, real-time extraction and communication of orientation data gives the operators of autonomous machines more visibility, control and actionable information. Integrating these capabilities with space and weight restricted applications such as unmanned vehicles, personnel tracking, platform stabilization, and robotics promises to promote smarter, more precise systems without compromising their original design or function.
Acknowledgements
MicroStrain thanks Steve Hamer and Robin Laughead of Hamilton Technology College for sharing their application details and experience for this case study. This paper does not represent an endorsement of any particular product or application by Hamilton Technical College.
