









Recent
-
-
Introducing Version 4.0.0 of the MicroStrain ROS Driver
Jan 29, 2024 /
-
-
-
Enhancing Vision-Based Robots with IMUs
Dec 19, 2023 /
-
-
-
MicroStrain to Join the HBK Family
Sep 18, 2023 /
-
-
-
Four Ways to Improve Your IMU Performance
Jun 30, 2023 /
-
Accurate Heading Estimates Improve INS Navigation Performance
- By david.robbins /
- Published Thu, 11/19/2020 - 10:26

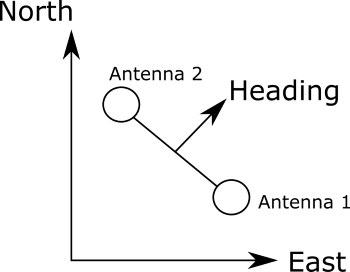
Information about a vehicle’s heading—the direction in which its longitudinal axis is centered—becomes important when an inertial system is added to a traditional GPS-based positioning system. This is because the system is no longer measuring position and velocity in just the “global” navigation coordinate frame of the GPS but is incorporating a “local” coordinate frame. Accelerometer measurements, specifically, represent local measurements that must be translated into the global frame.
Various methods of determining heading can be included in inertial navigation systems, including gyro compassing, magnetometer based heading, and kinematic alignment. But the most accurate—and easiest to implement—is dual antenna heading. Dual GNSS antennas give an absolute estimate of heading by measuring the relative position of the two antennas.
A Comparison of Heading Calculation Methods
In an inertial navigation system (INS) with global navigation satellite systems (GNSS) aiding, an Extended Kalman Filter (EKF) can be used track heading. During dynamic periods of linear acceleration, the EKF uses the difference between the locally integrated inertial solution and the GNSS global position to estimate heading. However, this method is only viable if the INS is constantly moving.
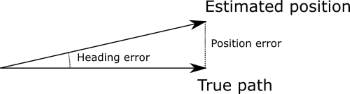
During stationary periods, where heading accuracy is maintained through gyro integration, error will increase over time. In addition, after startup the EKF will not have a valid heading estimate and will require an extended period of dynamic motion to converge on a heading solution. Dual antennas solve both these problems by providing an absolute heading measurement that is immune to magnetic disturbances and does not drift over time. This provides multiple benefits:
- Faster filter convergence after startup
- Improved filter performance during this convergence period
- Heading tracking during stationary and quasi-stationary periods
- No time required for filter reconvergence after stationary periods
Read Article
Parker LORD MicroStrain Sensing has introduced its first dual-antenna real time kinematic (RTK) enabled INS.
Featured products
3DMGQ7 GNSS/INS & 3DMRTKRelated Documents
Dynamic Performance Test ReportContact Microstrain today to learn more about its first dual-antenna RTK enabled INS.
