









Recent
-
-
Introducing Version 4.0.0 of the MicroStrain ROS Driver
Jan 29, 2024 /
-
-
-
Enhancing Vision-Based Robots with IMUs
Dec 19, 2023 /
-
-
-
MicroStrain to Join the HBK Family
Sep 18, 2023 /
-
-
-
Four Ways to Improve Your IMU Performance
Jun 30, 2023 /
-
GNSS Outage Test Report for the 3DMGQ7-GNSS/INS
- By david.robbins /
- Published Mon, 12/14/2020 - 14:08

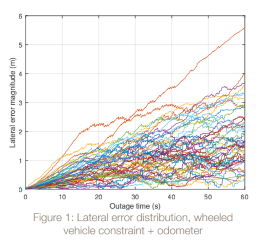
Global navigation satellite systems (GNSS) endure extensive testing to avoid errors occurring during use. To ensure GNSS sensors can be effective in different situations, they are tested on a route in both rural and urban areas.
Test Methodology
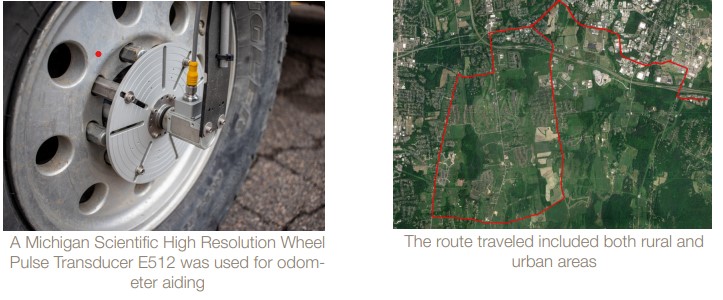
In the testing for Parker LORD’s 3DMGQ7-GNSS/INS all-in-one navigation solution, the procedure included collecting 30 minutes of navigation data using a test vehicle in a standard automotive environment. To do this, two UBlox ANN-MB antennas were mounted to the roof of the vehicle with a 1.5m baseline. A Michigan Scientific High Resolution Wheel Pulse Transducer E512 was used for odometer aiding. Real time kinematic (RTK) corrections were provided over a cellular network using Parker LORD’s 3DM-RTK Network Interface Modem.
During the course of the run, the 3DMGQ7 had consistent RTK coverage for a high precision navigation solution, and the Extended Kalman Filter (EKF) was allowed an initial convergence period before starting the first outage. An external navigation reference sensor was used to evaluate performance during GNSS outages.
Kalman Filter Configuration
The Outage performance was evaluated with three different system configurations
- Free integration: In this configuration, no aiding or constraints were supplied to the EKF.
- Wheeled vehicle constraint: Similar to the free integration configuration, this setup only uses integrated inertial data for navigation. However, a wheeled vehicle constraint was applied to the EKF. This constraint sets the body frame velocity perpendicular to the direction of travel to zero.
- Wheeled vehicle constraint + Odometer aiding: In addition to the wheeled vehicle constraint, a speed measurement was supplied to the EKF from a wheel odometer.
Results
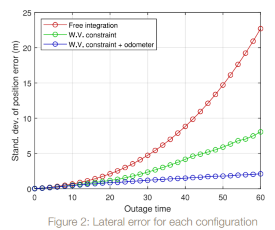
 In order to get a statistical measurement of the outage performance, a series of 60-second GNSS outages were simulated in post-processing. Using the exact same EKF algorithm that runs in real time on the 3DMGQ7, the data was reprocessed 50 times, each with a different GNSS outage time window. Figure 1 shows this error distribution for the odometer-aided configuration.
In order to get a statistical measurement of the outage performance, a series of 60-second GNSS outages were simulated in post-processing. Using the exact same EKF algorithm that runs in real time on the 3DMGQ7, the data was reprocessed 50 times, each with a different GNSS outage time window. Figure 1 shows this error distribution for the odometer-aided configuration.
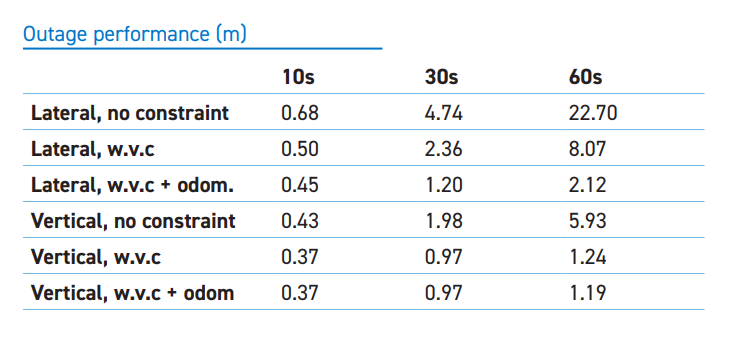
Outage performance was then defined as the standard deviation of position error at each time step. Figure 2 shows lateral navigation performance for each of the three sensor configurations.
Featured products
3DMGQ7 GNSS/INSRelated Documents
GNSS Outage Test ReportContact Microstrain today to learn more about its 3DMGQ7-GNSS/INS all-in-one navigation solution.
