













Contact for pricing and lead time--a minimum order quantity may apply

Contact for pricing and lead time--a minimum order quantity may apply

Contact for pricing and lead time--a minimum order quantity may apply

Contact for pricing and lead time--a minimum order quantity may apply

Contact for pricing and lead time--a minimum order quantity may apply
Contact for pricing and lead time--a minimum order quantity may apply

Pages
This value focused IMU is designed to balance cost and performance, and is ideally suited for a wide range of applications, including platform stabilization, balancing robots, antenna pointing, and usage monitoring.
The 3DM-GX5-AR is ideally suited for a wide range of applications, including platform stabilization antenna pointing and usage monitoring.
The 3DM-GX3® -35 is a miniature industrial-grade all-in-one navigation solution with integrated GPS and magnetometers, high noise immunity, and exceptional performance.
Product Highlights
- High performance integrated GPS receiver and MEMS sensor technology provide direct and computed PVA outputs in a small package.
- Triaxial accelerometer, gyroscope, magnetometer, temperature sensors, and a pressure altimeter achieve the best combination of measurement qualities.
- Dual on-board processors run a sophisticated Extended Kalman Filter (EKF) for excellent position, velocity, and attitude estimates.
The 3DM-GX4 -25™ is a miniature industrial-grade attitude heading and reference system (AHRS) with integrated magnetometers, high noise immunity, and exceptional performance.
Product Highlights
- High performance integrated MEMS sensor technologyprovide direct and computed AHRS outputs in a small package.
- Triaxial accelerometer, gyroscope, magnetometer, temperature sensors, and a pressure altimeter achieve the best combination of measurement qualities.
- Dual on-board processors run a sophisticated AdaptiveKalman Filter (AKF) for excellent static and dynamic attitude estimates and inertial measurements.
The SG-Link® -LXRS® is a small, low-power, two-channel analog input sensor node with many sampling options.
Product Highlights
- One differential and one single-ended analog input channel and an internal temperature sensor
- Ideal for remote and long term measurement of many Wheatstone bridge and analog-type sensors including: strain, force, torque, pressure, acceleration, vibration, magnetic field, displacement and geophones
- Supports continuous, burst, and event-triggered sampling and datalogging to internal memory
- User-programmable sample rates up to 4096 Hz
- IP65/66 environmental enclosures available
The EH-Link™ is a versatile multi-sensor node that runs on ambient energy sources such as vibration, light, and inductance.
Product Highlights
- Sophisticated self-powered node can harvest energy from ambient energy sources for indefinite remote deployment.
- On-board high-speed triaxial accelerometer, internal temperature sensor, internal relative humidity sensor, and an analog input channel provide many sensing options.
- Supports auxiliary energy storage options such as super-capacitors and rechargeable thin film batteries
LORD MicroStrain® LXRS® Wireless Sensor Networks enable simultaneous, high- speed sensing and data aggregation from scalable sensor networks. Our wireless sensing systems are ideal for sensor monitoring, data acquisition, performance analysis, and sensing response applications.
The gateways are the heart of the LORD MicroStrain wireless sensing system. They coordinate and maintain wireless transmissions across a network of distributed wireless sensor nodes . The LORD MicroStrain LXRS wireless communication protocol between LXRS nodes and gateways enable high- speed sampling, ±32 microseconds node- to- node synchronization, transmission range up to 2 kilometers, and lossless data throughput under most operating conditions.
Users can easily program nodes for data logging, continuous, event- triggered, and periodic burst sampling with the Node Commander ® software. The web- based SensorCloud™ interface optimizes data aggregation, analysis, presentation, and alerts for gigabytes of sensor data from remote networks.
Datasheet Manual
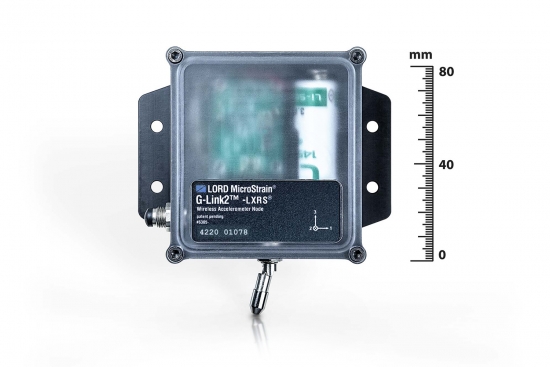
The G-Link2™ -LXRS® is a ruggedized wireless sensor node with high-speed sampling and optional integrated three-axis accelerometer or external single-axis accelerometer.
Product Highlights
- On-board triaxial, or external single axis MEMS accelerometer with up to +/-200 g measurement range
- Wireless framework is ideal for measuring vibration, and acceleration in remote applications.
- High resolution data with 16-bit A/D converter
- >User-programmable sample rates up to 10 KHz
- Transmit real-time data or log to memory.
- Small, lightweight IP67 enclosure
The V-Link® -LXRS® is a versatile seven channel analog wireless sensor node with high sample rates and datalogging capability.
Product Highlights
- Four differential and three single-ended analog input channels and an internal temperature sensor
- Ideal for remote and long term measurement of many Wheatstone bridge and analog-type sensors including: strain, force, torque, pressure, acceleration, vibration, magnetic field, displacement and geophones
- Supports continuous, burst, and event-triggered sampling and datalogging to internal memory
- l User-programmable sample rates up to 10 KHz
- l IP65/66 environmental enclosures available
Pages
Features of Our Lower Cost Inertial Measurement Units
Provides a Best in Class Performance
- High-performance, low-cost solution
- Direct PCB mount or chassis mount with ribbon cable
- Precision mounting alignment features
- Fully calibrated, temperature-compensated, and mathematically-aligned to an orthogonal coordinate system for highly accurate outputs
Ease of Use for Each 3DM-CV5-10 Miniature Inertial Unit
- Easy integration via comprehensive and fully backwards-compatible communication protocol
- Robust, forward compatible MIP packet protocol
- Common protocol between 3DM-GX3, GX4, RQ1, GQ4, GX5, and CV5
A Cost Effective Solution for Your Company
- Out-of-the box solution reduces development time
- Volume discounts available for these low cost inertial measurement units
Best in Class Performance
- Fully calibrated, temperature-compensated, and mathematically-aligned to an orthogonal coordinate system for highly accurate outputs
- Bias tracking, error estimation, threshold flags, and adaptive noise modeling allow for fine tuning to conditions in each application
- High-performance, low-drift gyros with noise density of 0.005°/sec/√Hz and VRE of 0.001°/s/g2RMS
- Accelerometer noise as low as 25 ug/√Hz
Ease of Use
- User-defined sensor-to-vehicle frame transformation
- Common protocol between 3DM-GX3, GX4, RQ1, GQ4, GX5, and CV5
- Robust, forward compatible MIP packet protocol
Cost Effective
- Out-of-the box solution reduces development time
- Volume discounts
Best in Class Performance
- Bias tracking, error estimation, threshold flags, and adaptive noise modeling allow for fine tuning to conditions in each application
- Accelerometer noise as low as 25 ug/√Hz
- Smallest and lightest industrial AHRS with Adaptive Kalman Filter available
Ease of Use
- Automatic magnetometer calibration and anomaly rejection eliminates the need for field calibration
- Automatically compensates for vehicle noise and vibration
- Easy integration via comprehensive and fully backwards-compatible communication protocol
- Common protocol between 3DM-GX3, GX4, RQ1, GQ4, GX5, and CV5 inertial sensor families for easy migration
Cost Effective
- Out-of-the box solution reduces development time
- Volume discounts
Best in Class Performance
- Fully calibrated, temperature-compensated, and mathematically-aligned to an orthogonal coordinate system for highly accurate outputs
- High performance, low drift gyros with noise density of 0.005°/sec/√Hz and VRE of 0.001°/s/g²2RMS
- Accelerometer noise as low as 25 µg/√Hz
- Common protocol between 3DM®-GX3, GX4, RQ1, GQ4, GX5, and CV5
Ease of Use
-
Automatic magnetometer calibration and anomaly rejection eliminates the need for field calibration
-
Automatically compensates for vehicle noise and vibration
- Easy integration via comprehensive and fully backward-compatible communication protocol
Cost Effective
- Out-of-the-box solution reduces development time
- Volume discounts
Best in Class Performance
- Fully calibrated, temperature compensated, and mathematically aligned to an orthogonal coordinate system for highly accurate outputs
- Bias tracking, error estimation, threshold flags, and adaptive noise, magnetic, and gravitational field modeling allow for fine tuning to conditions in each application.
- High performance, low drift gyros with noise density of 0.005°/sec/√Hz and VRE of 0.001°/s/g
2RMS
- Smallest and lightest industrial GPS/INS available
Ease of Use
- User-defined sensor-to-vehicle frame transformation
- Easy integration via comprehensive SDK
- Common protocol with the 3DM-GX3® and 3DM-RQ1-45™ sensor families for easy migration
Cost Effective
- Out-of-the box solution reduces development time.
- Volume discounts
Best in Class Performance
- Fully calibrated, temperature compensated, and mathematically aligned to an orthogonal coordinate system for highly accurate outputs
- Bias tracking, error estimation, threshold flags, and adaptive noise, magnetic, and gravitational field modeling allow for fine tuning to conditions in each application.
- High performance, low drift gyros with noise density of 0.005°/sec/√Hz and VRE of 0.001°/s/g2RMS
- Smallest and lightest industrial AHRS available
Ease of Use
- User-defined sensor-to-vehicle frame transformation
- Easy integration via comprehensive SDK
- Common protocol with the 3DM-GX3® and 3DM-RQ1-45™ sensor families for easy migration
Cost Effective
- Out-of-the box solution reduces development time.
- Volume discounts
Wireless Simplicity, Hardwired Reliability
High Performance
- Scalable, long range wireless sensor networks up to 2 km
- Lossless data throughput under most operating conditions
Ease of Use
- Rapid deployment with wireless framework
- Low power consumption allows extended use.
- Remotely configure nodes, acquire and view sensor data with Node Commander®.
- Optional web-based SensorCloud™ interface optimizes data storage, viewing, and analysis.
- Easy integration via comprehensive SDK
Cost Effective
- Out-of-the box wireless sensing solution reduces development and deployment time.
- Volume discounts
Wireless Simplicity, Hardwired Reliability™
High Performance
- Potential power sources include: solar energy (photovoltaic); electromagnetic fields (electrodynamic); thermal energy from temperature changes (thermoelectric); strain and vibration (piezoelectric); high impact energy, and capacitive discharge.
- Solar energy harvesting input operates in low light levels.
- Thermal energy harvesting input operates in thermal gradients below 8 ˚C when used with Peltier Thermoelectric Generators (TEGs).
- User-programmable sample rates up to 512 Hz
Ease of Use
- Scalable, wireless sensor networks up to 70 m
- Easy out-of-the-box wireless sensing for most analog sensors
Wireless Simplicity, Hardwired Reliability
High Performance
- Node-to-node synchronization up to ±32 microseconds
- Scalable, long range wireless sensor networks up to 2 km
- User-programmable filters for optimized anti-aliasing
Ease of Use
- Internal or external accelerometer option for installation versatility
- Remotely configure nodes, acquire and view sensor data with Node Commander®.
- Optional web-based SensorCloud™ interface optimizes data storage, viewing, and analysis.
- Easy integration via comprehensive SDK
Cost Effective
- Out-of-the box wireless sensing solution reduces development and deployment time.
- Volume discounts
Wireless Simplicity, Hardwired Reliability
High Performance
- Node-to-node synchronization up to ±32 microseconds
- High resolution data with 16-bit A/D converter
- Scalable, long range wireless sensor networks up to 2 km
- Lossless data throughput under most operating conditions
Ease of Use
- Rapid deployment with wireless framework
- Event driven triggers for efficient monitoring
- Remotely configure nodes, acquire and view sensor data with Node Commander®.
- Optional web-based SensorCloud™ interface optimizes data storage, viewing, and analysis.
- Easy integration via comprehensive SDK
Cost Effective
- Reduction of costs associated with wiring
- Low-cost per channel with 7 input channels per node
Pages
Sensor
-
High Performance Accelerometer
- 100 µg/√Hz (8g standard)
- 2g, 4g, 20g, 40g options
-
Super-stable Gyro
- 8 dph in-run bias (-40 to +85°C)
- Offset temperature hysteresis 0.05°/s
- ARW 0.3 °/√hr
Operation
- Adjustable sampling rates up to 1000Hz
- Forward compatible MIP Protocol optimizes bandwidth
- Configurable IMU outputs
- SensorConnect software for configuration, control, display, and logging
Package
- CNC Anodized Aluminum
- Precision alignment features
-
Highly compact and low profile
- 38.0 mm x 24.0 mm x 9.7 mm
- 11.0 grams
- TTL UART interface (up to 921600 BAUD)
- –40 to +85 °C operating temperature range
Sensor
-
High Performance Accelerometer
- 25 µg/√Hz (8g option)
- 80 µg/√Hz (20g option)
-
Super-stable Gyro
- 8 dph in-run bias (-40 to +85°C)
- Offset temperature hysteresis 0.05°/s
- ARW 0.3°/√hr
- Pitch-roll static/dynamic accuracy ±0.25°/0.4°
Operation
- IMU sampling rate up to 1000Hz
- Auto-adaptive EKF output rate up to 500Hz
- Independently configurable IMU and EKF outputs
- Forward compatible MIP Protocol optimizes bandwidth
- SensorConnect software for configuration, control, display, and logging
Package
- CNC Anodized Aluminum
- Precision alignment features
-
Highly compact and low profile
- 36.0 mm x 36.6 mm x 11 mm
- 16.5 grams
- USB and RS-232 (up to 921600 BAUD) interfaces
- –40 to +85 °C operating temperature range
Sensor
-
High Performance Accelerometer
- 25 µg/√Hz (8g option)
- 80 µg/√Hz (20g option)
-
Super-stable Gyro
- 8 dph in-run bias (-40 to +85°C)
- Offset temperature hysteresis 0.05°/s
- ARW 0.3°/√hr
- Pitch-roll static/dynamic accuracy ±0.25°/0.4°
Operation
- IMU sampling rate up to 1000Hz
- Auto-adaptive EKF output rate up to 500Hz
- Independently configurable IMU and EKF outputs
- Forward compatible MIP Protocol optimizes bandwidth
- SensorConnect software for configuration, control, display, and logging
Package
- CNC Anodized Aluminum
- Precision alignment features
-
Highly compact and low profile
- 36.0 mm x 36.6 mm x 11.1 mm
- 16.5 grams
- USB and RS-232 (up to 921600 BAUD) interfaces
- –40 to +85 °C operating temperature range
Sensor
- Multi-Constellation receiver tracks up to 32 satellites
-
High Performance Accelerometer
- 25 µg/√Hz (8g option)
- 80 µg/√Hz (20g option)
-
Super-stable Gyro
- 8 dph in-run bias (-40 to +85°C)
- Offset temperature hysteresis 0.05°/s
- ARW 0.3°/√hr
- Pitch-roll Dynamic Accuracy ±0.2°
Operation
- Adjustable sampling rates up to 500Hz
- 34 state auto-adaptive EKF
- Independently configurable IMU, GNSS, EKF outputs
- Forward compatible MIP Protocol optimizes bandwidth
- SensorConnect software for configuration, control, display, and logging
Package
- CNC Anodized Aluminum
- Precision alignment features
- Highly compact and low profile
- 44.2 mm x 36.6 mm x 11 mm
- 20 grams
- USB and RS-232 interfaces
- –40 to +85 °C operating temperature range
|
General |
|||
|---|---|---|---|
|
Integrated sensors |
Triaxial accelerometer, triaxial gyroscope, triaxial magnetometer, and temperature sensors, |
||
|
Data outputs |
Inertial Measurement Unit (IMU) outputs: acceleration, angular rate, magnetic field , deltaTheta, deltaVelocity Computed outputs LLH position, NED velocity, attitude estimates (in Euler angles, quaternion, orientation matrix), |
||
|
Resolution |
16 bit SAR oversampled to 17 bits |
||
|
Inertial Measurement Unit (IMU) Sensor Outputs |
|||
|
Accelerometer |
Gyroscope |
Magnetometer |
|
|
Measurement range |
±5 g (standard) ±1.7±16, and ±50 g (option) |
300°/sec (standard) ±50, ±600,±1200 °/sec (options) |
±2.5 Gauss |
|
Non-linearity |
±0.1 % fs |
±0.03 % fs |
±0.4 % fs |
|
Bias instability |
±0.04 mg |
18°/hr |
-- |
|
Initial bias error |
±0.002 g |
±0.25°/sec |
±0.003 Gauss |
|
Scale factor stability |
±0.05 % |
±0.05 % |
±0.1 % |
|
Noise density |
80 µg/√Hz |
0.03°/sec/√Hz |
100 µGauss/√Hz |
|
Alignment error |
±0.05° |
±0.05° |
±0.05° |
|
Adjustable bandwidth |
225 Hz (max) |
440 Hz (max) |
230 Hz (max) |
|
IMU filtering |
Digitally filtered (user adjustable) and scaled to physical input; coning and sculling integrals computed at 1 kHz |
||
|
Sampling rate |
30 kHz |
30 kHz |
7.5 kHz |
|
IMU data output rate |
1 Hz to 1000 Hz |
||
|
Computed Outputs |
|||
|
Attitude accuracy |
±0.5° roll, pitch, and heading (static, typ), ±2.0° roll, pitch, and heading (dynamic, typ) |
||
|
Attitude heading range |
360° about all axes |
||
|
Attitude resolution |
< 0.01° |
||
|
Attitude repeatability |
0.2° (typ) |
||
|
Calculation update rate |
1000 Hz |
||
|
Computed data output rate |
1 Hz to 500 Hz |
||
|
Global Positioning System (GPS) Outputs |
|||
|
Receiver type |
50-channel, L1 frequency, C/A code SBAS: WAAS, EGNOS, MSAS |
||
|
GPS data output rate |
1 Hz to 4 Hz |
||
|
Time-to-first-fix |
Cold start: 27 sec, aided start: 4sec, hot start: 1 sec |
||
|
Sensitivity |
Tracking: -159 dBm, cold start: -147 dBm, hot start: -156 dBm |
||
|
Velocity accuracy |
0.1 m/sec |
||
|
Heading accuracy |
0.5° |
||
|
Horizontal position accuracy |
GPS: 2.5 m CEP SBAS: 2.0 m CEP |
||
|
Time pulse signal accuracy |
30 nsec RMS < 60 nsec 99% |
||
|
Acceleration limit |
≤ 4 g |
||
|
Altitude limit |
No limit |
||
|
Velocity limit |
500 m/sec (972 knots) |
||
|
Operating Parameters |
|||
|
Communication |
USB 2.0 (full speed) RS232 (9,600 bps to 921,600 bps, default 115,200) |
||
|
Power source |
+ 3.2 to + 16 V dc |
||
|
Power consumption |
200 mA (typ), 250 mA (max) - Vpri = 3.2 V dc to 5.5 V dc 850 mW (typ), 1000 mW (max) - Vaux = 5.2 V dc to 16 V dc |
||
|
Operating temperature |
-40 °C to +65 °C |
||
|
Mechanical shock limit |
500 g |
||
|
Physical Specifications |
|||
|
Dimensions |
44.2 mm x 24.0 mm x 13.7 mm (excluding mounting tabs), 36.6 mm (width across tabs) |
||
|
Weight |
23 grams |
||
|
Regulatory compliance |
ROHS |
||
|
Integration |
|||
|
Connectors |
Data/power output: micro-DB9 GPS antenna: MMCX type |
||
|
Software |
MIP™ Monitor, MIP™ Hard and Soft Iron Calibration, Windows XP/Vista/7/8 compatible |
||
|
Compatibility |
Protocol compatibility with 3DM-RQ1™ and 3DM- GX4® sensor families. |
||
|
Software development kit (SDK) |
MIP™ data communications protocol with sample code available (OS and computing platform independent) |
||
|
General |
|||
|---|---|---|---|
|
Integrated sensors |
Triaxial accelerometer, triaxial gyroscope, triaxial magnetometer, temperature sensors, and pressure altimeter |
||
|
Data outputs |
Inertial Measurement Unit (IMU) outputs: acceleration, angular rate, magnetic field , ambient pressure, deltaTheta, deltaVelocity Computed outputs Adaptive Kalman Filter (AKF): filter status, GPS timestamp, attitude estimates (in Euler angles, quaternion, orientation matrix), bias compensated angular rate, pressure altitude, gravity-free linear acceleration, attitude uncertainties, gyroscope and accelerometer bias, scale factors and uncertainties, gravity and magnetic models, and more. Complementary Filter (CF): attitude estimates (in Euler angles, quaternion, orientation matrix), stabilized north and gravity vectors, GPS correlation timestamp |
||
|
Inertial Measurement Unit (IMU) Sensor Outputs |
|||
|
Accelerometer |
Gyroscope |
Magnetometer |
|
|
Measurement range |
±5 g (standard) ±16 g (option) |
300°/sec (standard) ±75, ±150, ±900°/sec (options) |
±2.5 Gauss |
|
Non-linearity |
±0.03 % fs |
±0.03 % fs |
±0.4 % fs |
|
Resolution |
<0.1 mg |
<0.008°/sec |
-- |
|
Bias instability |
±0.04 mg |
10°/hr |
-- |
|
Initial bias error |
±0.002 g |
±0.05°/sec |
±0.003 Gauss |
|
Scale factor stability |
±0.05 % |
±0.05 % |
±0.1 % |
|
Noise density |
100 µg/√Hz |
0.005°/sec/√Hz |
100 µGauss/√Hz |
|
Alignment error |
±0.05° |
±0.05° |
±0.05° |
|
Adjustable bandwidth |
225 Hz (max) |
250 Hz (max) |
- |
|
Offset error over temperature |
0.06% (typ) |
0.05% (typ) |
-- |
|
Gain error over temperature |
0.05% (typ) |
0.05% (typ) |
-- |
|
Scale factor non-linearity (@ 25° C) |
0.02% (typ) 0.06% (max) |
0.02% (typ) 0.06% (max) |
±0.0015 Gauss |
|
Vibration induced noise |
-- |
0.072°/s RMS/g RMS |
-- |
|
Vibration rectification error (VRE) |
-- |
0.001°/s/g2 RMS |
-- |
|
IMU filtering |
4 stage filtering: analog bandwidth filter to digital sigma- delta wide band anti-aliasing filter to (user adjustable) digital averaging filter sampled at 4 kHz and scaled into physical units; coning and sculling integrals computed at 1 kHz |
||
|
Sampling rate |
4 kHz |
4 kHz |
50 Hz |
|
IMU data output rate |
1 Hz to 1000 Hz |
||
|
Pressure Altimeter |
|||
|
Range |
-1800 m to 10,000 m |
||
|
Resolution |
< 0.1 m |
||
|
Noise density |
0.01 hPa RMS |
||
|
Sampling rate |
25 Hz |
||
|
Computed Outputs |
|||
|
Attitude accuracy |
AKF outputs: ±0.25° RMS roll & pitch, ±0.8° RMS heading (typ) CF outputs: ±0.5° roll, pitch, and heading (static, typ), ±2.0° roll, pitch, and heading (dynamic, typ) |
||
|
Attitude heading range |
360° about all axes |
||
|
Attitude resolution |
< 0.01° |
||
|
Attitude repeatability |
0.3° (typ) |
||
|
Calculation update rate |
500 Hz |
||
|
Computed data output rate |
AKF outputs: 1 Hz to 500 Hz CF outputs: 1 Hz to 1000 Hz |
||
|
Operating Parameters |
|||
|
Communication |
USB 2.0 (full speed) RS232 (9,600 bps to 921,600 bps, default 115,200) |
||
|
Power source |
+ 3.2 to + 36 V dc |
||
|
Power consumption |
100 mA (typ),120 mA (max) with Vpri = 3.2 V dc to 5.5 V dc 550 mW (typ), 800 mW (max) with Vaux = 5.2 V dc to 36 V dc |
||
|
Operating temperature |
-40 °C to +85 °C |
||
|
Mechanical shock limit |
500 g (calibration unaffected) 1000 g (bias may change) 5000 g (survivability) |
||
|
MTBF |
1.2 million hours (Telcordia method I, GL/35C) 0.45 million hours (Telcordia method I, GM/35C) |
||
|
Physical Specifications |
|||
|
Dimensions |
36.0 mm x 24.4 mm x 11.1 mm (excluding mounting tabs), 36.6 mm (width across tabs) |
||
|
Weight |
16.5 grams |
||
|
Enclosure material |
Aluminum |
||
|
Regulatory compliance |
ROHS, CE |
||
|
Integration |
|||
|
Connectors |
Data/power output: micro-DB9 |
||
|
Software |
MIP™ Monitor, MIP™ Hard and Soft Iron Calibration, Windows XP/Vista/7/8 compatible |
||
|
Compatibility |
Protocol compatibility with 3DM-GX3® and 3DM- RQ1-45™ sensor families. |
||
|
Software development kit (SDK) |
MIP™ data communications protocol with sample code available (OS and computing platform independent) |
||
|
General |
|
|---|---|
|
Sensor input channels |
Differential analog, 1 channel Single-ended analog, 1 channel |
|
Integrated sensors |
Internal temperature, 1 channel |
|
Data storage capacity |
2 M bytes (up to 1,000,000 data points, data type dependent) |
|
Analog Input Channels |
|
|
Measurement range |
Differential: full-bridge, ≥ 350 Ω (factory configurable) Single-ended: 0 to 3 V dc |
|
Accuracy |
± 0.1% full scale typical |
|
Resolution |
12 bit |
|
Anti-aliasing filter bandwidth |
Single-pole Butterworth -3 dB cutoff @ 250 Hz (factory configurable) |
|
Bridge excitation voltage |
+3 V dc, 50 mA total for all channels (pulsed @ sample rates ≤ 16 Hz to conserve power) |
|
Measurement gain and offset |
User-selectable in software on differential channels gain values from 104 to 1800 |
|
Integrated Temperature Channel |
|
|
Measurement range |
-40 °C to 85 °C |
|
Accuracy |
± 2 °C (at 25 °C) typical |
|
Resolution |
12 bit |
|
Sampling |
|
|
Sampling modes |
Synchronized, low duty cycle, datalogging |
|
Sampling rates |
Continuous sampling: 1 sample/hour to 512 Hz Periodic burst sampling: 32 Hz to 4096 Hz Datalogging: 32 Hz to 4096 Hz |
|
Sample rate stability |
± 3 ppm |
|
Network capacity |
Up to 2000 nodes per RF channel (and per gateway) depending on the number of active channels and sampling settings. Refer to the system bandwidth calculator: http://www.microstrain.com/configure-your-system |
|
Synchronization between nodes |
± 32 μsec |
|
Operating Parameters |
|
|
Radio frequency (RF) transceiver carrier |
2.405 to 2.470 GHz direct sequence spread spectrum over 14 channels, license free worldwide, radiated power programmable from 0 dBm (1 mW) to 16 dBm (39 mW); low power option available for use outside the U.S.- limited to 10dBm (10mW) |
|
Range for bi-directional RF link |
70 m to 2 km line of sight with RF power setting |
|
RF communication protocol |
IEEE 802.15.4 |
|
Power source |
Internal: 3.7 V dc, 250 mAh lithium ion rechargeable battery External: +3.2 to +9.0 V dc |
|
Power consumption |
See power profile : |
|
Operating temperature |
-20 ˚C to + 60 ˚C (extended temperature range available with custom battery/enclosure, -40 ˚C to + 85 ˚C electronics only) |
|
Acceleration limit |
500 g standard (high g option available) |
|
Physical Specifications |
|
|
Dimensions |
58 mm x 50 mm x 21 mm |
|
Weight |
42 grams |
|
Environmental rating |
Indoor use (IP65/66 enclosures available) |
|
Enclosure material |
ABS plastic |
|
Integration |
|
|
Compatible gateways |
All WSDA® base stations and gateways |
|
Compatible sensors |
Bridge type analog sensors, 0 to 3 V dc analog sensors |
|
Connectors |
Screw terminal block |
|
Shunt calibration |
Internal shunt calibration resistor 499 KΩ, differential channel |
|
Software |
SensorCloud™, SensorConnect™, Node Commander®, Windows 7 (or newer) |
|
Software development |
Open-source MicroStrain Communications Library (MSCL) with sample code available in C++,Python,and.NET formats (OS and computing platform independent): http://lord-microstrain.github.io/MSCL/ |
|
Regulatory compliance |
FCC (U.S.), IC (Canada), ROHS |
|
General |
|
|---|---|
|
Sensor input channels |
Energy harvesting, 3 source types and channels Differential analog, 1 channel |
|
Integrated sensors |
Triaxial MEMS accelerometer, 3 channels Internal temperature, 1 channel Relative humidity, 1 channel |
|
Energy Harvesting Inputs |
|
|
Wide range voltage (WRV) input |
5 to 20 V ac/dc peak, (piezoelectric, electrodynamic, photovoltaic, electromagnetic) |
|
Capacitive discharge voltage (CDV) input |
20 to 130 V ac (pulsed piezoelectric) |
|
Ultra-low voltage (ULV) input |
20 to 600 mV dc (thermoelectric, Peltier, thermopile) |
|
Analog Input Channel |
|
|
Measurement range |
Differential: full-bridge, ≥ 350 Ω (factory configurable), user programmable gain and offset |
|
Accuracy and resolution |
± 0.1% full scale typical, 12 bit resolution |
|
Bridge excitation voltage |
+2.7 V dc, 50 mA (pulsed @ sample rates ≤ 16 Hz to conserve power) |
|
Integrated Accelerometer Channels |
|
|
Measurement range |
± 16 g |
|
Accuracy and resolution |
± 4 mg, 12 bit resolution |
|
Integrated Temperature Channel |
|
|
Measurement range |
-40 °C to 85 °C |
|
Accuracy and resolution |
± 2 °C (at 25 °C) typical , 12 bit resolution |
|
Integrated Relative Humidity (RH) Channel |
|
|
Measurement range |
0 to 100 % |
|
Accuracy |
± 2 % (10 to 90 % RH), ± 4 % ( 0 to 10% RH and 90 to 100% RH) |
|
Repeatability |
± 0.1 % |
|
Sampling |
|
|
Sampling modes |
Low duty cycle |
|
Sampling rates |
Continuous sampling: 1 Hz to 512 Hz |
|
Sample rate stability |
± 3 ppm |
|
Network capacity |
Up to 2000 nodes per RF channel (and per gateway) depending on the number of active channels and sampling settings. |
|
Operating Parameters |
|
|
Radio frequency (RF) transceiver carrier |
2.405 to 2.470 GHz direct sequence spread spectrum over 14 channels, license-free worldwide, radiated power 0 dBm |
|
RF communication protocol |
IEEE 802.15.4 |
|
Range for bi-directional RF link |
70 m line of sight |
|
Energy use |
Startup: 12 μJ; sampling: accelerometer or RH sensor only, 105 μJ/sample; sampling: differential input only, 168 μJ/sample; data transmission: 92.4 μJ/packet |
|
Operating temperature |
-20 ˚C to + 60 ˚C |
|
Operating humidity |
0 to 95 %, non-condensing |
|
Acceleration limit |
500 g standard |
|
Physical Specifications |
|
|
Dimensions |
88 mm x 39 mm x 16 mm |
|
Weight |
26 grams |
|
Integration |
|
|
Compatible gateways |
All WSDA® base stations and gateways |
|
Compatible sensors |
Bridge type analog sensors (for analog inputs) |
|
Connectors |
Screw terminal blocks |
|
Software |
SensorCloud™, Node Commander®, WSDA® Data Downloader, Live Connect™, Windows XP/Vista/7 compatible |
|
Software development kit (SDK) |
Data communications protocol available with EEPROM maps and sample code (OS and computing platform independent) http://www.microstrain.com/software-development-kits-sdks |
|
Regulatory compliance |
ROHS |
|
General |
|
|---|---|
|
Sensor input channels |
Single-axis MEMS accelerometer (option), 1 channel |
|
Integrated sensors |
Triaxial MEMS accelerometer (option), 3 channels |
|
Data storage capacity |
4 M bytes (up to 2,000,000 data points, data type dependent) |
|
Accelerometer Channels (integrated or external) |
|
|
Measurement range |
± 2 g or ± 10 g standard (± 5 g, ± 30 g, ± 50 g, ±100 g, or ± 200 g options available) |
|
Accelerometer bandwidth |
0 to = 100 Hz @ -3 dB (high bandwidth option available) |
|
Resolution |
16 bit |
|
Accuracy |
0.3 % error (typical @ 25 Hz, 1/2 of dynamic range with sinusoidal input) |
|
Noise |
± 2 g: 130 µ g/vHz , ± 10 g: 420 µ g/vHz (typical with 100 Hz anti- aliasing filter setting) |
|
Anti-aliasing filter bandwidth |
Fifth order low-pass Butterworth filter, user programmable bandwidth from 26 Hz to 1 KHz |
|
Integrated Temperature Channel |
|
|
Measurement range |
-40 °C to 125 °C |
|
Accuracy and resolution |
± 5 °C (over full range) , 16 bit |
|
Sampling |
|
|
Sampling modes |
Synchronized, low duty cycle, datalogging |
|
Sampling rates |
Continuous sampling: 1 32 to 512 Hz Periodic burst sampling: 32 to 512 Hz Datalogging: 32 Hz to 10 KHz |
|
Sample rate stability |
± 3 ppm |
|
Network capacity |
Up to 2000 nodes per RF channel (and per gateway) depending on the number of active channels and sampling settings. Refer to the system bandwidth calculator: http://www.microstrain.com/configure-your-system |
|
Synchronization between nodes |
± 32 μsec |
|
Operating Parameters |
|
|
Radio frequency (RF) transceiver carrier |
2.405 to 2.470 GHz direct sequence spread spectrum over 14 channels, license free worldwide, radiated power programmable from 0 dBm (1 mW) to 16 dBm (39 mW); low power option available for use outside the U.S.- limited to 10dBm (10mW) |
|
Range for bi-directional RF link |
70 m to 2 km line of sight with RF power setting |
|
RF communication protocol |
IEEE 802.15.4 |
|
Power source |
Internal: 3.6 V dc,2.6 Ah, AA replaceable lithium battery External: 2.2 V dc to 5 V dc |
|
Power consumption |
1 channel: 20.1 mA (average) 3 channels: 34.9 mA (average) |
|
Operating temperature |
-40 ˚C to + 85 ˚C |
|
Acceleration limit |
tested to 380 g |
|
MTBF |
378,000 hours (Telcordia method, SR332) |
|
Physical Specifications |
|
|
Dimensions |
Internal accelerometer:68 mm x 85 mm x 33.5 mm with mounting tabs External accelerometer (option): 32 mm x 21.5 mm x 16 mm |
|
Weight |
Node with internal accelerometer and battery: 178 grams Node with external accelerometer, cable and battery: 252 grams |
|
Environmental rating |
IP67 |
|
Enclosure material |
Aluminum and clear polycarbonate |
|
Integration |
|
|
Compatible gateways |
All WSDA® base stations and gateways |
|
Compatible sensors |
LORD MicroStrain® accelerometer (external accelerometer option) |
|
Connectors |
M5 screw-on IP67 connector (external accelerometer option) |
|
Software |
SensorCloud™, SensorConnect™, Node Commander®, Windows 7 (or newer) |
|
Software development |
Open-source MicroStrain Communications Library (MSCL) with sample code available in C++,Python,and.NET formats (OS and computing platform independent): http://lord-microstrain.github.io/MSCL/ |
|
Regulatory compliance |
FCC (U.S.), IC (Canada), ROHS |
| General | |
|---|---|
|
Sensor input channels |
Differential analog, 4 channels Single-ended analog, 3 channels |
|
Integrated sensors |
Internal temperature, 1 channel |
|
Data storage capacity |
4 M bytes (up to 2,000,000 data points, data type dependent) |
| Analog Input Channels | |
|
Measurement range |
Differential: full-bridge, ≥ 350 Ω (factory configurable) Single-ended: 0 to 3 V dc |
|
Accuracy |
± 0.1% full scale typical |
|
Resolution |
16 bit |
|
Anti-aliasing filter bandwidth |
Single-pole Butterworth -3 dB cutoff @ 250 Hz (factory configurable) |
|
Bridge excitation voltage |
+3 V dc, 50 mA total for all channels (pulsed @ sample rates ≤ 16 Hz to conserve power) |
|
Measurement gain and offset |
User-selectable in software on differential channels gain values from 21 to 13074 |
| Integrated Temperature Channel | |
|
Measurement range |
-40 °C to 85 °C |
|
Accuracy |
± 2 °C (at 25 °C) typical |
|
Resolution |
16 bit |
| Sampling | |
|
Sampling modes |
Synchronized, low duty cycle, datalogging, event-triggered |
|
Sampling rates |
Continuous sampling: 1 sample/hour to 512 Hz Periodic burst sampling: 32 Hz to 10 KHz Datalogging: 32 Hz to 10 KHz |
|
Sample rate stability |
± 3 ppm |
|
Network capacity |
Up to 2000 nodes per RF channel (and per gateway) depending on the number of active channels and sampling settings. Refer to the system bandwidth calculator: http://www.microstrain.com/configure-your-system |
|
Synchronization between nodes |
± 32 μsec |
| Operating Parameters | |
|
Radio frequency (RF) transceiver carrier |
2.405 to 2.470 GHz direct sequence spread spectrum over 14 channels, license free worldwide, radiated power programmable from 0 dBm (1 mW) to 16 dBm (39 mW); low power option available for use outside the U.S.- limited to 10dBm (10mW) |
|
Range for bi-directional RF link |
Outdoor/line-of-sight: 2 km (ideal) *, 800 m (typical)** Indoor/obstructions: 50 m (typical)** |
|
RF communication protocol |
IEEE 802.15.4 |
|
Power source |
Internal: 3.7 V dc, 650 mAh lithium ion rechargeable battery External: +3.2 to +9.0 V dc |
|
Power consumption |
See power profile : |
|
Operating temperature |
-20 ˚C to + 60 ˚C (extended temperature range available with custom battery/enclosure, -40 ˚C to + 85 ˚C electronics only) |
|
Acceleration limit |
500 g standard (high g option available) |
| Physical Specifications | |
|
Dimensions |
74 mm x 79 mm x 21 mm |
|
Weight |
141 grams |
|
Environmental rating |
Indoor use (IP65/66 enclosures available) |
|
Enclosure material |
Anodized aluminum |
| Integration | |
|
Compatible gateways |
All WSDA® base stations and gateways |
|
Compatible sensors |
Bridge type analog sensors, 0 to 3 V dc analog sensors |
|
Connectors |
Screw terminal block |
|
Shunt calibration |
Internal shunt calibration resistor 499 KΩ, differential channels |
|
Software |
SensorCloud™, Node Commander®, Windows XP/Vista/7 |
|
Software development |
Open-source MicroStrain Communications Library (MSCL) with sample code available in C++,Python,and.NET formats (OS and computing platform independent): http://lord-microstrain.github.io/MSCL/ |
|
Regulatory compliance |
FCC (U.S.), IC (Canada), CE, ROHS |
*Measured with antennas elevated, no obstructions, and no RF interferers.
**Actual range varies depending on conditions such as obstructions, RF interference, antenna height, & antenna orientation.
Pages
General Documentation
Technical Notes
- When to use “Capture Gyro Bias”
- Interface Control Drawing (ICD)
- C-Series Connectivity Board Interface Control Document (RED BOARD)
- C-Series Connectivity Board Interface Control Document (BLACK BOARD)
- Inertial product comparison
- Inertial Sensor Utils User Manual
- Using a Hardware Datalogger with Inertial Sensors
General Documentation
Technical Notes
- Product Comparison: GX5 Series vs. GV7 Series
- Inertial product comparison
- Inertial Sensor Utils User Manual
- Migrating from 3DM-GX4 to 3DM-GX5 Series
- Using a GX5 with Bluetooth RS-232 Adapters
- Auto-Adaptive Dynamic Roll & Pitch Performance
- When to use “Capture Gyro Bias”
- Using a Hardware Datalogger with Inertial Sensors
General Documentation
Technical Notes
- Product Comparison: GX5 Series vs. GV7 Series
- Migrating from 3DM-GX4 to 3DM-GX5 Series
- Inertial product comparison
- Inertial Sensor Utils User Manual
- Using a GX5 with Bluetooth RS-232 Adapters
- When to use “Capture Gyro Bias”
- Auto-Adaptive Dynamic Roll & Pitch Performance
- Using a Hardware Datalogger with Inertial Sensors
General Documentation
Technical Notes
- Product Comparison: GX5 Series vs. GV7 Series
- Migrating from 3DM-GX4 to 3DM-GX5 Series
- Using a GX5 with Bluetooth RS-232 Adapter
- Auto-Adaptive Dynamic Roll & Pitch Performance
- When to use “Capture Gyro Bias”
- Inertial Product Comparison
- Inertial Sensor Utils User Manual
- Using a Hardware Datalogger with Inertial Sensors
General Documentation
- 3DM-GX3® -35 Product Datasheet
- 3DM-GX3® -35 Quick Start Guide
- 3DM-GX3® -35 Data Communications Protocol Manual
- 3DM-GX3® Data Communications Protocol Errata
- Firmware Upgrades for 3DM-GX3®
- MIP Hard and Soft Iron Calibration Quick Start Guide
- 3DM-GX3® -35 Declaration of Conformity
- Inertial product comparison
Technical Notes
- 3DM-GX3® Importing Magnetic Vectors
- Extending the USB Cable
- Using an Hardware Datalogger with Inertial Sensors
- 3DM-GX3® Startup Settings
- Using Dataloggers with Inertial Sensors
- Using u-blox Software with 3DM-GX3®-35 and 3DM-GX3®-45
- Outputting NMEA Packets to GPS Ready Software
- Phihong PSA05R-090 Power Supply
- GPS Antenna Performance Comparison
- 3DM-GX3® -35 Communication and Power Connector
Mechanical Prints (Uncontrolled)
- 3DM-GX3® -35 Sensor Origin
- 3DM-GX3® GPS Antenna
- Gilsson Antenna Mounting
- 3DM-GX3®-25/35/45 Mounting Holes
- 3065-7046 3DM-GX3® -35 Enclosure Lid Drawing
- 3065-7045 3DM-GX3® -35 Enclosure Base Drawing
- 6224-0100 Craft Cable with Micro DB9 and 9 flying leads
- 6225-4220 3DM-GX3® -35 Dimensional Drawing
- 6212-1040 9022-0019 Micro D-to-USB Communication and Power Cable
- 6212-1000 4005-0037 Micro D-to-RS232 Communication and Power Cable
Video
General Documentation
- 3DM-GX4 -25™ Product Datasheet
- 3DM-GX4 -25™ Quick Start Guide
- 3DM-GX4 -25™ User Manual
- 3DM-GX4-25™ Data Communications Protocol
- Inertial products overview
- 3DM-GX4™ Products Declaration of Conformity
Technical Notes
- Migrating From a GX3® Series Sensor to a GX4™
- Using a Hardware Datalogger with a 3DM-GX4™
- 3DM-GX4-25™ Communication and Power Connector
Mechanical Prints (Uncontrolled)
- 3DM-GX4-25™ Block Diagram
- 6224-0100 Craft Cable with Micro DB9 and 9 flying leads
- 6212-1040 Micro D-to-USB Communication and Power Cable
- 6212-1000 Micro D-to-RS232 Communication and Power Cable
Video
General Documentation
- SG-Link®-LXRS® Product Datasheet
- SG-Link®-LXRS® Quick Start Guide
- SG-Link®-LXRS® User Manual
- Node Commander Wireless Sensing Software User Manual
- Wireless Products Comparison
Technical Notes
- Powering a Wireless Node with Sources Greater Than 9 Volts
- Measuring Voltages Above 3 Volts with SG-Link®-LXRS®
- Using a Load Cell with SG-Link®-LXRS®
- LXRS® Firmware Upgrades
- Control a Relay with a Wireless Node
- Measuring Small Current
- Outputting a 4 to 20 mA Current Loop
- Using Pressure Transducers
- Battery Use and Replacement
- SG-Link® 350 Ohm Tester Board
- SG-Link® 1000 Ohm Tester Board
- IP and NEMA Rated Enclosures for Wireless Nodes
- SG-Link®-LXRS™ Power Profile
- Wireless Sensor Node Power Profiles
- Using External Power With Wireless Sensor Nodes
- Using the DEMOD-DC® with V-Link®-LXRS® and SG-Link®-LXRS®
- Synchronized Sampling on Startup
- Differential Analog Input Frequency Response Testing
- Distance Measurement with an IR Sensor
- Using Differential Inputs for a RTD
Mechanical Drawings (uncontrolled)
- SG-Link®-LXRS® Dimensional Drawing
- 6309-3000 SG-Link-IP66-ENCL
- 6309-4000 SG-Link-IP66-XL-ENCL
- 6309-5000 SG-Link-IP65-XXL-ENCL
- 6309-3000 IP66/NEMA4X Enclosure for SG-Link®-LXRS®
- 6309-4000 IP66/NEMA4X Enclosure for SG-Link®-LXRS® (1 battery)
- 6309-5000 IP65/NEMA4X Enclosure for SG-Link®-LXRS® (3 batteries)
Videos
General Documentation
- EH-Link® Data Sheet
- EH-Link™ Quick Start Guide
- Node Commander Wireless Sensing Software User Manual
- Wireless Products Comparison
Technical Notes
- EH-Link™ Powered by Thermoelectric Generator
- EH-Link™ Powered by Indoor Solar Cell
- EH-Link™ Powered by Piezoelectric Source
Mechanical Drawings
FAQs
General Documentation
- G-Link2™ -LXRS® Product Datasheet
- G-Link2™ -LXRS® Quick Start Guide
- G-Link2™ -LXRS® User Manual
- Node Commander Wireless Sensing Software User Manual
- G-Link-2 Power Profile
- Wireless Products Comparison
Technical Notes
- Powering a Wireless Node with Sources Greater Than 9 Volts
- G-Link2™ -LXRS® Resonance Sweep
- G-Link2™ -LXRS® Sustained Acceleration Testing
- LXRS® Firmware Upgrades
- Synchronized Sampling on Startup
Videos
- NC QSG #1 General Communications
- NC QSG #2 Node Configuration
- NC QSG #3 Real-Time Streaming
- NC QSG #4 Legacy Low Duty Cycle
- NC QSG #5 Synchronized Sampling
- NC QSG #6 Armed Data Logging
General Documentation
- V-Link®-LXRS® Product Manual
- V-Link®-LXRS® Product Datasheet
- V-Link®–LXRS® Quick Start Guide
- V-Link®-LXRS® Document of Conformity
- Node Commander Wireless Sensing Software User Manual
- Wireless Products Comparison
Technical Notes
- Powering a Wireless Node with Sources Greater Than 9 Volts
- High Cycle Vibration and Function Test
- Event Driven Sampling
- Measuring Voltages Above 3 Volts with V-Link®-LXRS®
- LXRS® Firmware Upgrades
- Using a 4 to 20 mA Pressure Transducer
- Control a Relay with a Wireless Node
- Measuring Small Current
- Measuring Small Voltages
- Outputting a 4 to 20 mA Current Loop
- Using Pressure Transducers
- Battery Use and Replacement
- V-Link®-LXRS® 350 Ohm Tester Board
- V-Link®-LXRS® 1000 Ohm Tester Board
- V-Link®-LXRS® Pin Assignments
- Using the 50g, 100g, 200g or 500g Triaxial Accelerometer Cube
- IP and NEMA Rated Enclosures for Wireless Nodes
- Calculating a Linear Slope with Microsoft Excel®
- Using a Load Cell with V-Link®-LXRS™ and SG-Link®-LXRS®
- V-Link®-LXRS® Power Profile
- Wireless Sensor Node Power Profiles
- Using External Power With Wireless Sensor Nodes
- Using the DEMOD-DC® with V-Link®-LXRS® and SG-Link®-LXRS®
- Synchronized Sampling on Startup
- Distance Measurement with an IR Sensor
- Using Differential Inputs for a RTD
Mechanical Drawings (Uncontrolled)
- V-Link®–LXRS® Dimensional Drawing
- 6313-3100 V-Link-IP66-XL-ENCL
- 6313-3100 IP66/NEMA4X Enclosure for V-Link®-LXRS® (2 batteries)
Videos
Pages
Software/Firmware
Software/Firmware
More
- Micro D-to-USB Communication and Power Cable
- Micro D-to-RS232 Communication and Power Cable
- PSA-05R-090 9 Volt DC Power Supply for RS-232 Cable
- Craft Cable with Micro DB9 and Flying Leads
- 3DM-GX5-15 Drawing (STP File)
- Dewesoft Inertial Sensor Manual
- 6212-3004 CONNECTIVITY KIT, USB, AHRS/IMU
- 6212-3001 CONNECTIVITY KIT, RS232, AHRS/IMU
Software/Firmware
More
- Micro D-to-USB Communication and Power Cable
- Micro D-to-RS232 Communication and Power Cable
- PSA-05R-090 9 Volt DC Power Supply for RS-232 Cable
- Craft Cable with Micro DB9 and Flying Leads
- 3DM-GX5-25 Drawing (STP File)
- Dewesoft Inertial Sensor Manual
- 6212-3004 CONNECTIVITY KIT, USB, AHRS/IMU
- 6212-3001 CONNECTIVITY KIT, RS232, AHRS/IMU
Software/Firmware
More
- Tallysman TW4721 GNSS Antenna Datasheet
- Micro D-to-USB Communication and Power Cable
- Micro D-to-RS232 Communication and Power Cable
- PSA-05R-090 9 Volt DC Power Supply for RS-232 Cable
- Craft Cable with Micro DB9 and Flying Leads
- 3DM-GX5-45 Drawing (STP File)
- 3DM-GX5-45 Dimensional Drawing with Sensor Origin
- Dewesoft Inertial Sensor Manual
- 6212-3000 CONNECTIVITY KIT, RS232, GNSS
- 6212-3002 CONNECTIVITY KIT USB, GNSS
Software
- MIP Monitor Data Acquisition Software
- MIP Software Development C Code Sample for Windows and Linux Version 1.1
- MIP LabVIEW Sample Code
- 3DM-GX3® -35 and 3DM-GX3® -45 Sample MATLAB code
- 3DM-GX3® -35 Sample Campbell Scientific CRBASIC code for CR1000/3000 Dataloggers
- SensorConnect Data Acquisition Software (beta)
Mechanical
Software
- MIP Monitor Data Acquisition Software
- MIP Software Development C Code Sample for Windows and Linux Version 1.1
- SensorConnect Data Acquisition Software (beta)
Mechanical
Software
- SensorConnect Data Acquisition Software (beta)
- Node Commander Data Acquisition Software
- MicroStrain Communication Library (MSCL)
- Software Systems Overview (link)
- SensorCloud Overview (link)
- MicroStrain SDK LabView Examples (legacy)
Firmware
Software
- SensorConnect Data Acquisition Software (beta)
- Node Commander Data Acquisition Software
- MicroStrain Communication Library (MSCL)
- Software Systems Overview (link)
- SensorCloud Overview (link)
- MicroStrain SDK LabView Examples (legacy)
Firmware
