









Recent
-
-
Introducing Version 4.0.0 of the MicroStrain ROS Driver
Jan 29, 2024 /
-
-
-
Enhancing Vision-Based Robots with IMUs
Dec 19, 2023 /
-
-
-
MicroStrain to Join the HBK Family
Sep 18, 2023 /
-
-
-
Four Ways to Improve Your IMU Performance
Jun 30, 2023 /
-
Rapidly Changing Roles for ROS™ in Unmanned and Autonomous Applications
- By Elena /
- Published Tue, 04/28/2020 - 10:32
Robot Operating System (ROS™)
Only a short time ago we were debating the merits of automated delivery vehicles, autonomous survey bots and packages delivered from drones. These technologies are moving forward rapidly, and at the heart of all this activity is an open source platform billed as a “robotics middleware,” ROS. ROS stands for Robot Operating System. The ROS ecosystem is rich and has been growing rapidly for over ten years. Everything a designer, researcher or tinkerer needs to build a robotic platform exists in some form today.
At the heart of most platforms resides an IMU, the inner ear of sorts, designed to help the robot navigate, remain upright and move about in our world. To meet the surging need for ROS support, our engineering team has developed an ROS Package (ROS lingo for drivers, libraries or anything one might find useful for using a product) for a wide range of inertial sensors. The open source package includes support for MicroStrain IMU’s and INS’s. Customers are already leveraging these drivers for many applications, including unmanned delivery robots and SLAM.
MicroStrain Sensors that work best with ROS
 We offer a variety of MicroStrain Inertial Measurement Units (IMU) and Inertial Navigation Systems (INS) that work with ROS drivers to help you build robot applications. Our C-Series sensors include the CX and CV products, and our G-Series features the GQ and GX, providing options of different levels of functionality to suits various needs.
We offer a variety of MicroStrain Inertial Measurement Units (IMU) and Inertial Navigation Systems (INS) that work with ROS drivers to help you build robot applications. Our C-Series sensors include the CX and CV products, and our G-Series features the GQ and GX, providing options of different levels of functionality to suits various needs.
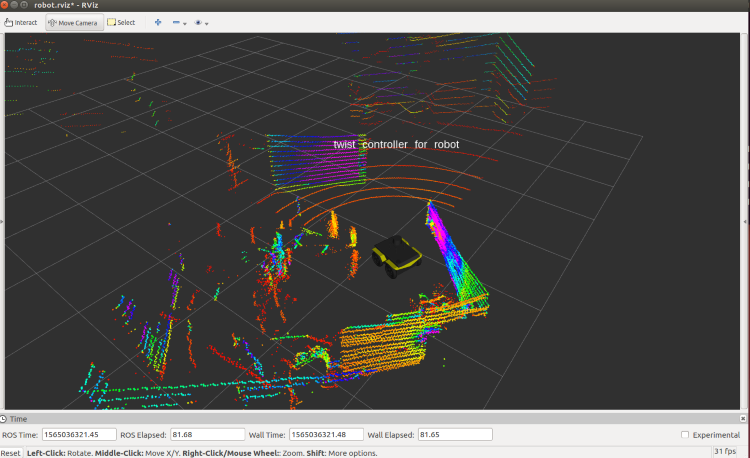
SLAM
Simultaneous Localization and Mapping is the location awareness and recording of the environment in a map of a device, robot, drone or other autonomous vehicles.
A robot that uses SLAM employs various types sensors such as radar, lidar, cameras, IMUs and other technologies to understand its environment. By understanding the environment and how its moving through it, a robot can more effectively map, navigate and/or avoid obstacles. A good IMU is essential to this process. Accurately measuring the robot's true movement (not just theoretical) will lead to significantly superior results.

